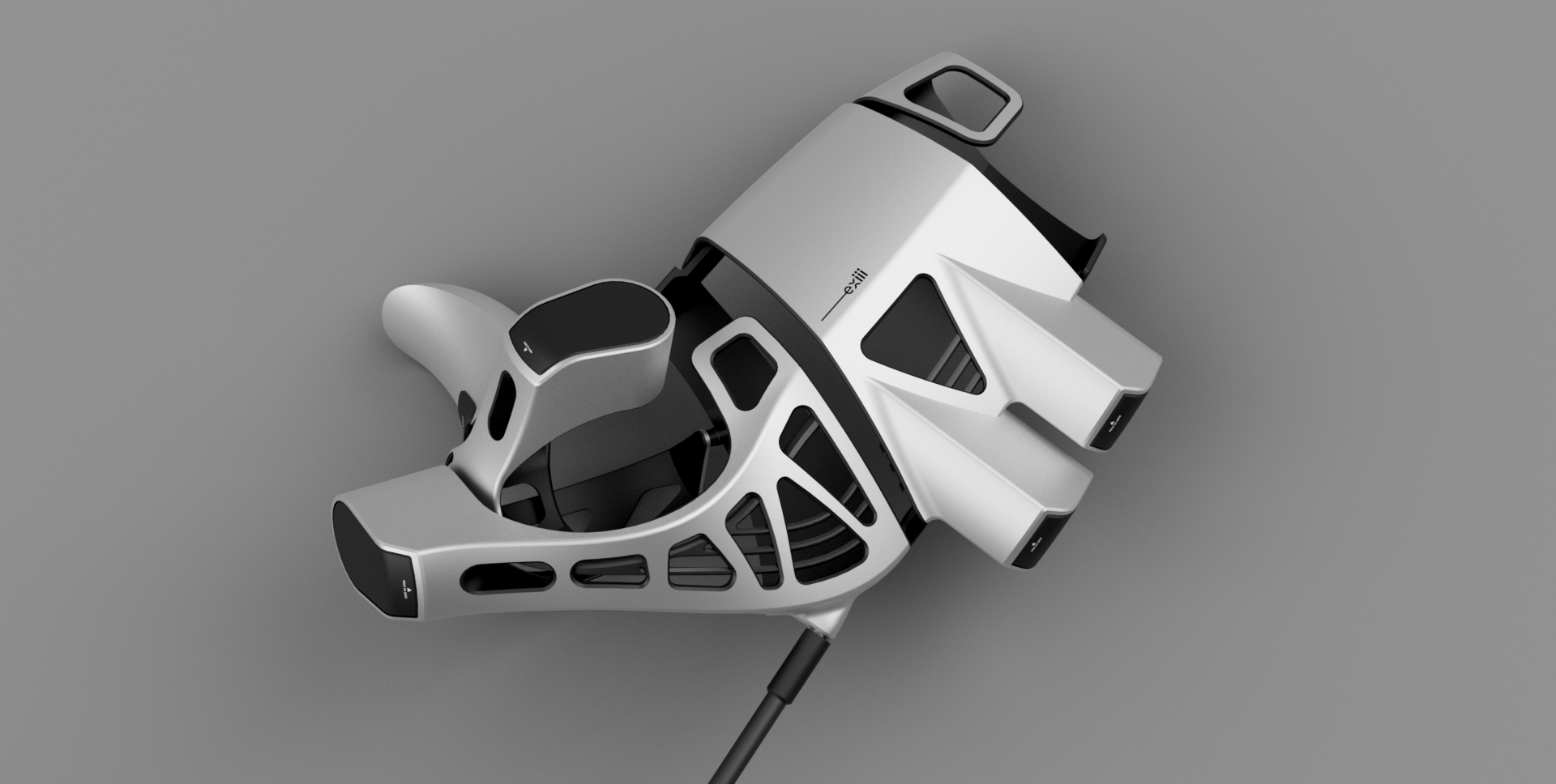
EXOS is a new haptic enabled VR glove which uses force feedback to deliver the sensation of physicality when inside immersive applications.
Tokyo based developer Exiii are working on a new VR glove which delivers so-called “reactive force” in response to your actions inside virtual reality – the practical upshot of which is that you’re able to ‘feel’ virtual objects.
Some of you may recall our coverage of Dexta Robotic’s Dexmo haptic feedback solution a little while back and, although perhaps not quite as ambitious, EXOS does look like an interesting approach to the problem of force touch.
Unlike Dexmo however, the EXOS adopts a more simplistic, less granular approach to the problem. Whereas Dexmo provides incremental resistance and finger extension tracking for all four digits and thumbs (per glove), EXOS offers individual thumb and then collective 4 finger movement and force feedback. And whilst this might seem like a regressive step when compared to its other exoskeleton stablemate, it might turn out to be a smart design choice. By reducing complexity and sacrificing fidelity, EXOS’ design may prove more robust, with less moving parts in play and a simpler set of programmatic requirements. This is pure speculation at this stage of course, we’ve not had our hands on the device yet.

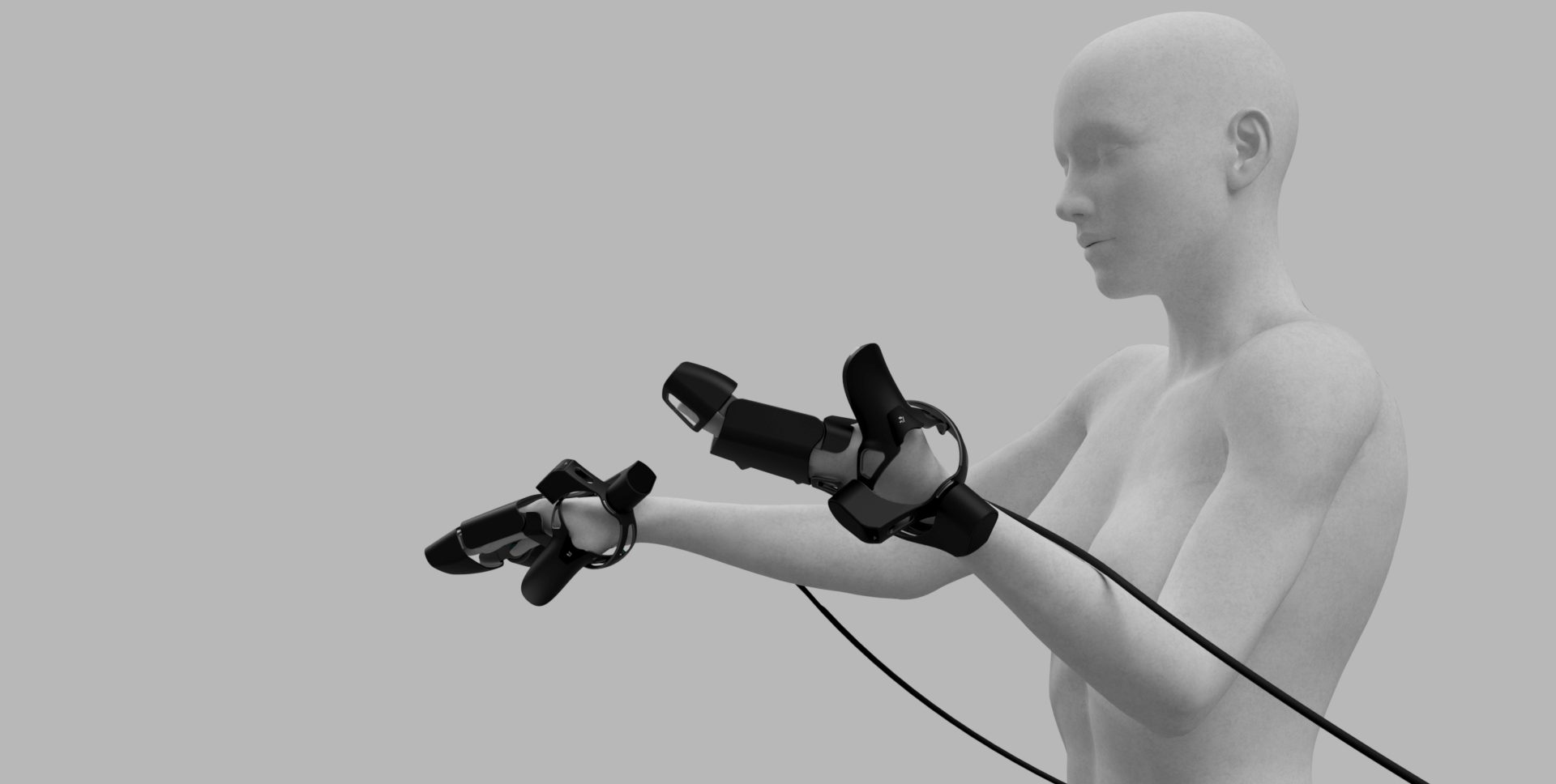
More detailed information on the device is scant at this stage, although the developer’s video above does indicate that the devices are at present wired and don’t currently have an integrated tracking solution (check the retrofitted Vive controllers). Demonstrations of how the glove deals with hard and soft surfaces are given, but with no detail as to how much force or to what granularity it can be applied, it’s difficult to know how effective the device is.
Nevertheless, this sort of 2nd or 3rd generation VR-related technology keeps us excited for the future and reminds us that, although VR may be available and in people’s homes, there are a vast array of opportunities and problems still yet to be solved.





