HaptX, a company building a VR glove offering impressively detailed haptic feedback as well as force feedback, is steadily improving. My hands-on with their latest device—which is smaller, lighter, and more comfortable than prior iterations—offered me moments of magic where it felt like my hand was actually interacting with real objects.
Let’s get this out of the way up front: there’s still much room for improvement to HaptX’s haptic force feedback glove. Before technology like this could make its way to consumers, it needs to be much smaller, easier to use, and less expensive. But for now the company is focusing on getting everything right first, and is targeting the less price sensitive enterprise segment to get there. They announced recently that they now leasing dev kits of their VR glove to enterprises who want to experiment with it.
{kind=link}
If nothing else, HaptX is a great proof of the importance of taking haptics beyond the simple rumbling mechanisms available in most of today’s VR equipment. The glove can create brief moments where you really feel like you’re touching something that isn’t actually there.
For me this was clearest when doing something seemingly mundane: using my fingers to rotate a cube. I probably did so for a good five or ten minutes, using cubes of various sizes, because I wanted to understand why it felt convincing.
The answer is feedback. It seems obvious, but it’s quite fascinating when you break it down.
I wrote in greater detail about how the HaptX glove works in my first hands-on with the device—but there’s two major pieces that make it capable of those brief moments of magical immersion:
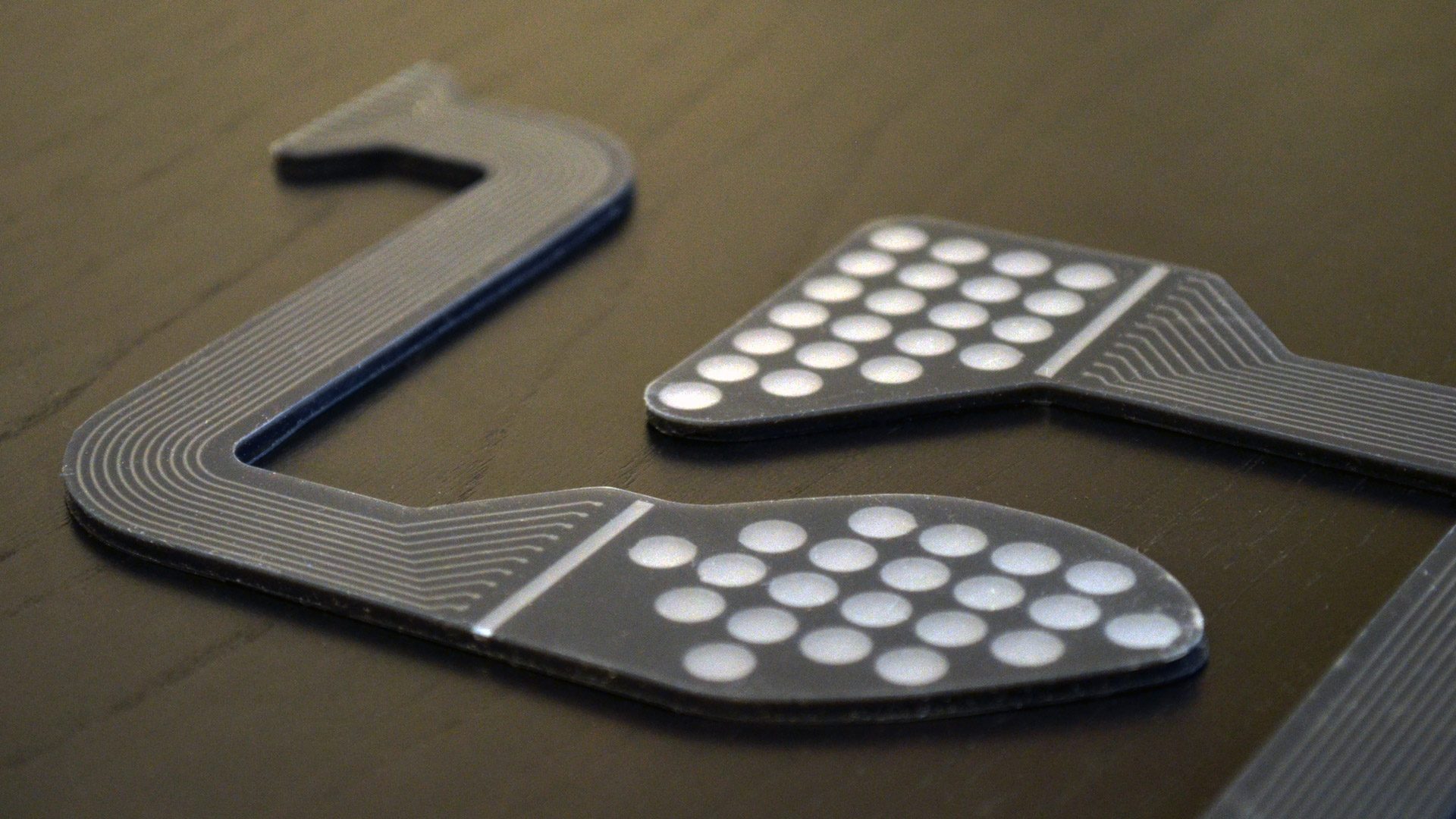
First is haptic feedback, which aims to create subtle sensations of objects touching the user. For this, the HaptX glove uses arrays of micro-pneumatic actuators—effectively grids of little inflatable bladders which can be inflated and deflated quickly and precisely. By using the arrays to press against the palm and fingertips as needed, the glove can create a sense that an object is touching the user.
{kind=link}
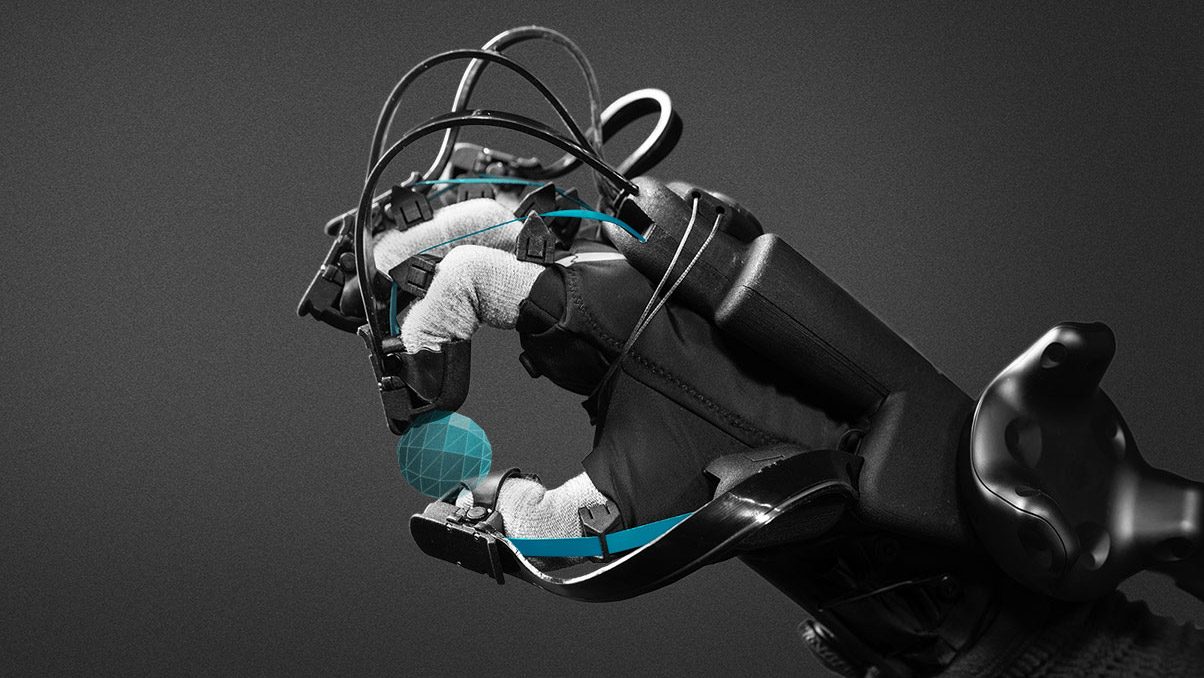
The second is force feedback, which is about pushing back or inhibiting the user’s movement in the same way that a corresponding physical object would. To this end, the HaptX glove has a mechanical brake on each finger which can prevent the finger from bending any further. For instance, when gripping a baseball, your fingers come in contact with the sides of the ball and are physically stopped by it. The HaptX glove simulates this by stopping your fingers from moving past where the point that they would stop if you were really holding a physical object.
{kind=link}
I’ve attempted the same cube spinning interaction with various VR hand-tracking tech (which tracked my hands but offered no haptics or force feedback), and it’s never felt very good. The HaptX glove succeeds here because it provides additional information (feedback) which hand-tracking without haptics cannot provide.
For one, I know when my virtual hand is coming in contact with the virtual object beyond simple visual verification because I can feel it pushing against my finger tips. This means it’s clear to me that the object is responding to me and able to be gripped.
{kind=link}
But it’s the force feedback which ultimately seals the deal, because by stopping my fingers at roughly the correct points in space means I can then rely on entirely natural physical manipulations, like subtly rotating the cube with two fingers (the way that you might twist a knob). Without the force feedback, I’d need to make a mock grabbing gesture in order to keep my fingers in the right place (which feels very unnatural), or rely on an unnatural abstracted gesture to make the system understand that I wanted to grip, but then I’d need to figure out new means of manipulating the object with that gesture instead of interacting with the object as if was truly there.
Continued on Page 2 »
Page: 1 2