FluxPose is a 6DOF tracking solution for full-body tracking that seems to be picking up speed on Kickstarter, having now garnered over $2 million in crowdfunding since its initial launch on November 29th.
The News
FluxPose is a full-body tracking system that’s said to deliver occlusion-free positional tracking without the need of externally mounted base stations or sensors. It does this by way of a wearable beacon, which generates magnetic fields, the team explains on the FluxPose Kickstarter campaign.
“It’s completely occlusion-free, incredibly compact, drift-free, and the trackers last up to 24 hours on a single charge, offering high-end performance in the smallest, lightest form factor possible,” the Logrono, Spain-based team says.
And because the beacon is worn on your body, and automatically synchronizes the tracking space with VR headsets without any additional software, it essentially means the tracking volume moves with you as you move (or more likely, dance) in VR.
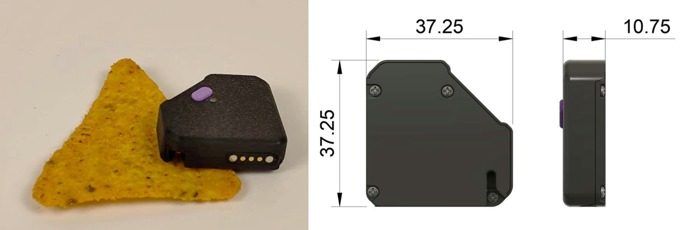
Weighing in at 85 grams, the trackers are also impressively compact: a Dorito for scale.
At the time of this writing, the cheapest support tier is the ‘Lite Kit’ for €339 (~$394 USD), which comes with three tracking points (straps sold separately). At the higher end is the ‘Pro Kit’ for €689 (~$800 USD), which includes eight tracking points. Notably, those prices do not include taxes or import tariffs.
VR headset mounts provided through the Kickstarter are said to include Quest 2/3/3S/Pro, Pico 4/4 Ultra, Samsung Galaxy XR, HTC Vive Pro/Pro 2/Focus/XR Elite, Bigscreen Beyond 1/2, Valve Index, and Steam Frame. Backers will have the chance to select the exact headset model on a survey after the Kickstarter ends, and again a few months before delivery.
You can find out more over on the FluxPose Kickstarter, which we’ll be following for the campaign’s remaining 58 days, ending on January 28th, 2026. The earliest delivery is expected in August 2026 for early bird supporters, and October 2026 for late comers to the Kickstarter.
My Take
Magnetically-tracked peripherals aren’t anything new in VR; I’ve seen a number of solutions come and go, with the emphasis mostly on go: Razer Hydra, Sixense Stem, Atraxa, Magic Leap 1 controllers—these implementations seem to be good enough in optimal conditions, but not rock solid across the board.
In short, magnetic trackers position themselves in 3D space by measuring the intensity of the magnetic field in various directions, which (as mentioned above) is generated by a beacon. When the trackers’ measurement point is rotated, the distribution of the magnetic field changes across its various axes, allowing for it to be positionally tracked.
And while those magnetically-tracked peripherals listed above don’t suffer from optical occlusion, they can be affected by external magnetic fields, ferromagnetic materials in the tracking volume, and conductive materials near the emitter or sensor. These things typically reduce tracking quality, making them less reliably accurate than optical (Quest 3) or laser-positioned systems (SteamVR base stations).
Granted, I haven’t tried FluxPose yet, although I don’t think those drawbacks are nearly as important in fully-body tracking than they might be in actual motion controllers, which require much higher accuracy. A few millimeter’s discrepancy in your foot’s position really doesn’t matter as much as it might if you were reaching out and trying to grab something with a magnetically-tracked controller.
Provided Road to VR doesn’t get to go hands-on in the coming months, I’ll be keeping my eyes peeled for videos and articles as we move closer to the campaign’s close next month.



